Workshop Highlights
The 1st edition of the GROUND Workshop, held at the IEEE RO-MAN 2023 Conference, concluded with flying colors! We managed to gather more than 70 researchers - in person and through Zoom - interested in group-robot interaction!
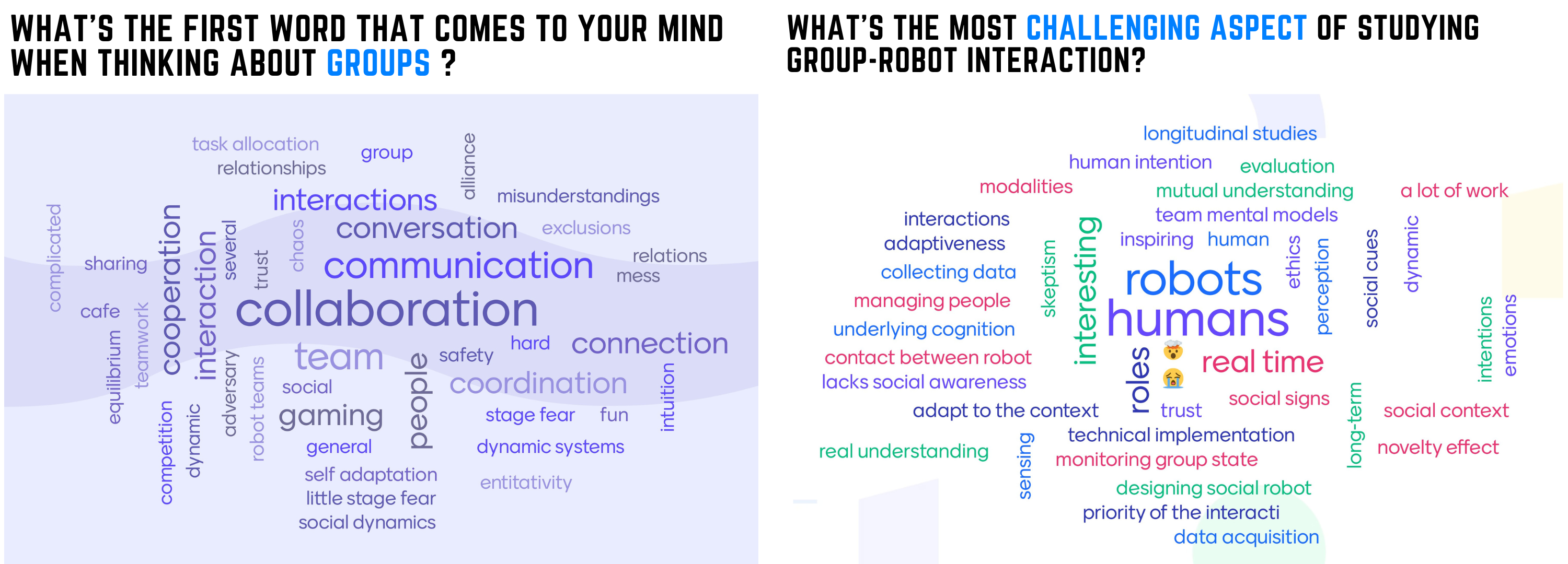
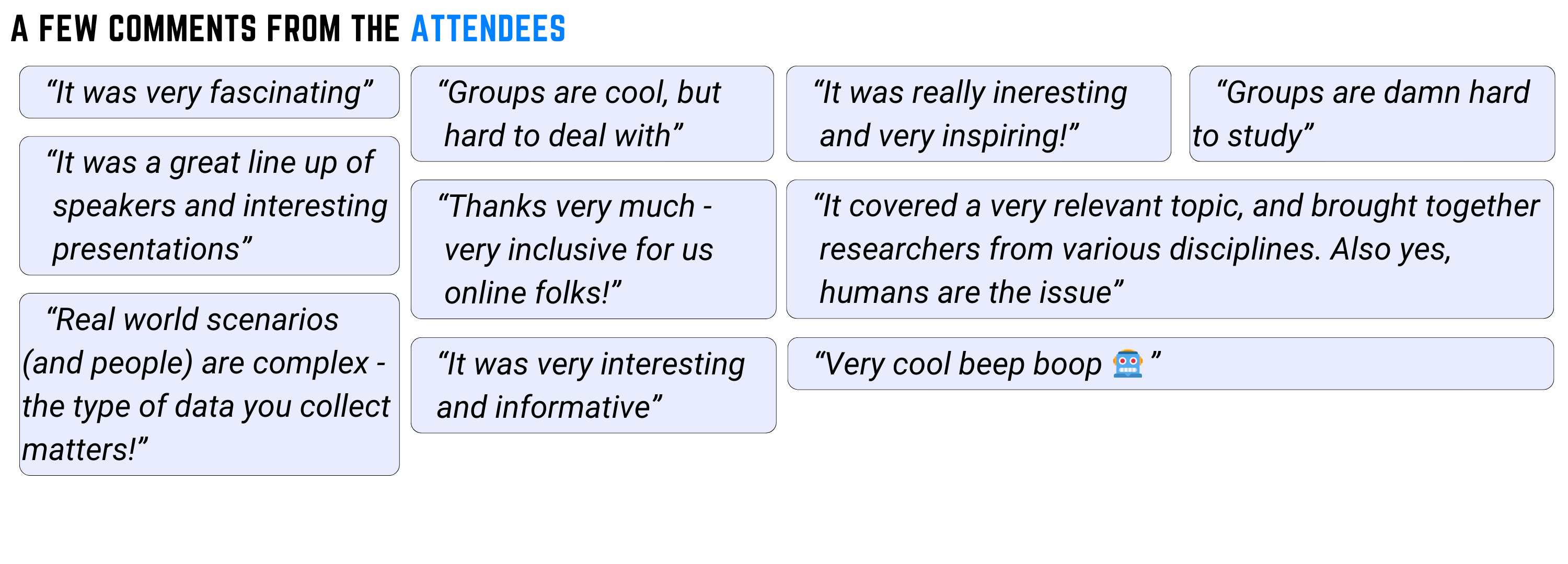
Here are some feedback about group-robot interaction from the interactive sessions.
Program
| Activity | Starting Time CEST (GMT+2) | Starting Time KST (GMT+9) |
|---|---|---|
| Opening session | 06:45 AM | 01:45 PM |
| Keynote by Giovanna Varni + QA | 07:00 AM | 02:00 PM |
| Lightning talk by Filipa Correia +QA | 07:30 AM | 02:30 PM |
| Paper presentation session | 07:50 AM | 02:50 PM |
| Coffee break | 08:30 AM | 03:30 PM |
| Keynote by Danilo Gallo + QA | 08:45 AM | 03:45 PM |
| Lightning talk by Pablo Barros + QA | 09:15 AM | 04:15 PM |
| (G)Round Table + conclusion | 09:35 AM | 04:35 PM |
Paper Presentation Session
Authors will have 5 minutes to showcase their contribution live, followed by 3 minutes for Questions & Answers.
The contributions have be presented in the following order:
-
Towards the use of a social mediator robot in a school setting, Sara Cooper and Randy Gomez
-
Group Storytelling in Learning Activities Using ChatGPT for Story Generation, Anne-Marie Rusu and Daniel Carnieto Tozadore
-
Detecting agreement in multi-party dialogue - evaluating speaker diarisation versus a procedural baseline to enhance user engagement., Angus Addlesee, Daniel Denley, Andy Edmondson, Nancie Gunson, Daniel Hernandez Garcia, Alexandre Kha, Oliver Lemon, James Ndubuisi, Neil O’Reilly, Lia Perochaud, Raphaël Valeri, Miebaka Worika
-
Detecting Agreement in Multi-party Conversational AI, Laura Schauer, Jason Sweeney, Charlie Lyttle, Zein Said, Aron Szeles, Cale Clark, Nancie Gunson, Katie McAskill, Xander Wickham, Tom Byas, Daniel Hernandez Garcia, Angus Addlesee, Oliver Lemon
-
Asch Meets HRI - Human Conformity to Robot Groups, Jasmin Bernotat, Doreen Jirak, Eduardo Benitez Sandoval, Francisco Cruz
Keynote Speakers

- Giovanna Varni
Automated analysis of social interaction in groups of humans is receiving a growing interest from researchers in several fields including Computer Engineering, Robotics and so on. The topic is indeed particularly relevant in the perspective of future human-centered AI systems that will ground the basis for novel hybrid man-machine communities. Leveraging the interplay of Computer and Social Sciences, my research focuses on automated understanding of groups emergent states, that are social processes resulting from the micro-level affective, behavioural and cognitive interactions among group members. This talk will present a selection of my previous and current research achievements in this area with a particular reference to cohesion, coordination, and potency.

Danilo Gallo
Robots deployed in real-world scenarios face the challenge of fitting into unstructured and dynamic environments shared with people. Understanding of and adaptability to context is crucial for ensuring socially acceptable robot behaviors, even in the case of unfocused interactions with bystanders. This talk illustrates some of the challenges involved in understanding the group dynamics, proxemics, and privacy and ethical concerns related to the robots' presence in diverse shared spaces and social situations. I will present a series of use cases inspired by the deployment of autonomous delivery robots in our company's HQ building in South Korea. The talk explores how disciplines such as sociology, design, and computer science contribute to understanding and designing robots that smoothly integrate into the dynamics of groups. Through an interdisciplinary approach, we aim to define robot behaviors that effectively adapt to contextual factors in order to promote socially acceptable interactions in shared spaces.
Lightning Speakers

- Pablo Barros
Over the last few years, there has been an increased interest in designing, adapting, and measuring the performance of different learning strategies when developing social agents for group interaction. In particular, with the recent advents in deep reinforcement learning and large language models, we can adapt subjective knowledge, usually through symbolic representations, and achieve a level of social interaction with virtual agents and robots that was not possible in the past. The choice of a learning strategy, however, also impacts how a specific agent acquires and model knowledge within a scenario, which means that in a social task, the choice of a learning algorithm has a direct relation to how this agent will interact with others, and most importantly, how it will be perceived as a social entity. In this talk, I will present the results of our recent research on understanding the impact different learning strategies have on social perception in a competitive game scenario. I will also discuss how to leverage these differences to build social components, such as subjective rivalry, to further endow these agents to be perceived distinctively when interacting with humans, purely based on their different learning algorithms.

Filipa Correia
Robots for teamwork settings might have several roles, ranging from teammates to moderators. When reaching robotic autonomy in those settings, perceiving the social environment and group dynamics is of extreme importance. However, adapting to those perceptions might be non-trivial and requires assessing the impact of the robot on group dynamics and teamwork. I will present two recent examples of my research work on the robot’s gaze responsiveness strategies and the robot’s moderating behaviors to balance participation in a conversation between children with mixed-visual abilities.